The main idea of FEM (Finite Element Method) is to convert the
infinite problem of solving a differential equation into the
finite problem of solving a set of simultaneous linear equations.
Let f(x) be the unknown function of the
differential equationP(f(x))=Q(f(x)).
We try to approximate the f(x) by the basis functionsk=1∑nfkvk(x). The idea of the basis functions in
FEM is similar to SH (Spherical Harmonics) or Fourier. But
since the aim of the FEM is usually to discretize the domain of f(x), the basis functions in FEM is much
simpler than in SH or Fourier. For example, when the domain of f(x) is [0, 1], let v1(x)={10x∈[0,21]x∈[21,1] and
v2(x)={01x∈[0,21]x∈[21,1],
evidently v1(x) and v2(x) are orthogonal.
Let r(x)=P(k=1∑nfkvk(x))−Q(k=1∑nfkvk(x)) be the residual. The
projection of the residual onto each basis function should be zero. This means that, for each i
= 1 ... n, we have the equation ∫r(x)vi(x)=∫(P(j=1∑nfjvj(x))−Q(j=1∑nfjvj(x)))vi(x)=0 of which the result is essentially a linear
equation about the n coefficients fj. And these n linear equations are composed as the simultaneous linear equations about the
n coefficients fj.
Note that the basis function vi(x) is also called the weight
function or test function, the R(x)=r(x)vi(x) is also called the weighted
residual, and the linear equation ∫r(x)vi(x)=0 is also called the variational
form or the weak form in FreeFEM.
Rendering Equation
The Rendering Equation is also called the LTE (Light
Transport Equation) by "14.4 The Light Transport Equation" of PBR
Book V3. And we have the Rendering EquationLo(p,ωo)=Le(p,ωo)+∫Ωf(p,ωi,ωo)Li(p,ωi)(cosθi)+dωi.
According to the Rendering Equation, by OSL (Open Shading Language), the
surface and the light are actually the same thing, since the light is merely the surface which is emissive.
By "Figure 11.1" of Real-Time Rendering Fourth
Edition and "Figure 14.14" of PBR
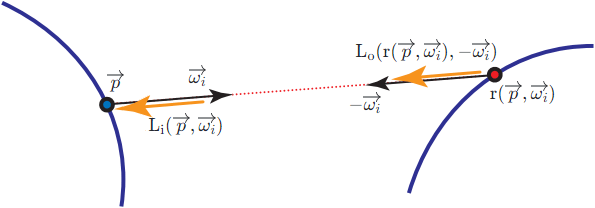
Book V3, by assuming no participating media, we have the relationship Li(p,ωi)=Lo(r(p,ωi),−ωi) where r(p,ω) is the ray-casting function. This means
that the incident radiance Li(p,ωi) at one point p is exactly the exitant
radiance Lo(r(p,ωi),−ωi) at another point r(p,ωi).
Hence, both the incident radiance Li(p,ω) and the exitant radiance Lo(p,ω) can be represented by the same function
L(p,ω). And thus, we have L(p,ωo)=Le(p,ωo)+∫Ωf(p,ωi,ωo)L(r(p,ωi),−ωi)(cosθi)+dωi which is a differential equation of which the unknown function is the L(p,ω).
Thus, the problem of rendering is essentially a problem of solving the differential
equation. There are two independent approaches: ray tracing (which depends on the Fredholm
theory) and radiosity (which depends on the FEM).
Note that the term radiosity B has been deprecated and should be called
radiant exitance M or outgoing irradiance E instead. But to be consistent with
most literature about radiosity, we still use radiosity B here.
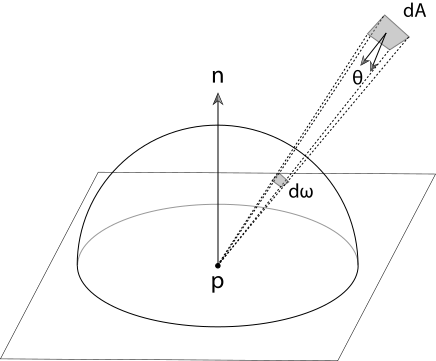
By "Equation (5.6)" of PBR
Book V3, we have the relationship dω=r2cosθdA.
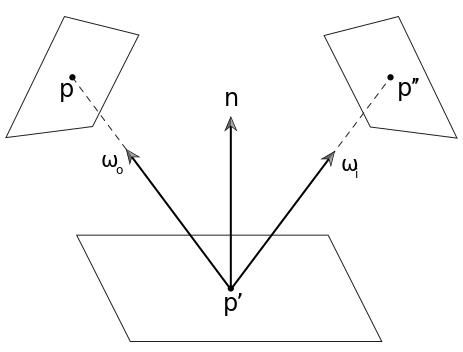
By "Equation (14.14)" of PBR
Book V3, let V be the visibility function and we have the surface form of the rendering equation L(p′→p)=Le(p′→p)+∫Af(p′′→p′→p)V(p′′↔p′)L(p′′→p′)(cosθ′)+∥p′′−p′∥2(cosθ′′)+dA(p′′)=Le(p′→p)+∫Af(p′′→p′→p)L(p′′→p′)G(p′′→p′)dA(p′′) where integral interval A is the area of all the surfaces
in the scene and G(p′′→p′)=V(p′′↔p′)∥p′′−p′∥2(cosθ′)+(cosθ′′)+.
We assume that the Lambert BRDF f(p′′→p′→p)=π1ρhd(p′) is used. This means that the outgoing
radiance is the same in all directions and we have the relationship L(p′→p)=πB(p′) where the B(p′) does NOT depend on the direction p′→p. Hence, by "Equation (2.54)" of [Cohen 1993], the rendering equation can be written as the
radiosity equationπB(p′)=πBe(p′)+∫Aπ1ρhd(p′)πB(p′′)G(p′′→p′)dA(p′′) ⇒ B(p′)=Be(p′)+π1ρhd(p′)∫AB(p′′)G(p′′→p′)dA(p′′) ⇒ B(p)=Be(p)+π1ρhd(p)∫AB(p′)G(p′→p)dA(p′).
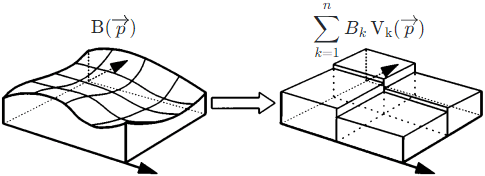
By "Equation (3.2)" of [Cohen 1993], by FEM, the surface is
discretized into n patches, and the solution of the radiosity equationB(p) is approximated by n basis
functionsk=1∑nBkVk(p). And by "Equation (3.3)" of
[Cohen 1993], the basis function can be as simple as the constant basis
function, which is the P0 Element in FreeFEM, Vk(p)={10p∈Akp∈/Ak where
Ak is the area of the k-th patch surface.
By "Equation (3.4)" of [Cohen 1993], we have the residualr(p)=j=1∑nBjVj(p)−(Be(p)+π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))=j=1∑nBjVj(p)−Be(p)−π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′).
By "Equation (3.19)" of [Cohen 1993], the projection of the residual onto each basis
function should be zero. This means that, for each i = 1 ... n, we have the linear equation about the n
coefficients Bj0=∫Ar(p)Vi(p)dA(p)=∫A(j=1∑nBjVj(p)−Be(p)−π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))Vi(p)dA(p)=BiAi−BieAi−Aiρihdj=1∑nFijBj where Ai is the area of the i-th patch surface, Be(p) is the assumed to be the constant Bie over the i-th patch surface, ρhd(p) is the assumed to be the constant ρihd over the i-th patch surface and Fij=Ai1π1∫Ai∫AjG(p′→p)dA(p′)dA(p) is the form factor. This means that Bi=Bie+ρihdj=1∑nFijBj which is exactly the "Equation (11.4)" of Real-Time
Rendering Fourth Edition.
Proof
By Linearity Property, we have ∫A(j=1∑nBjVj(p)−Be(p)−π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))Vi(p)dA(p)=∫A(j=1∑nBjVj(p))Vi(p)dA(p)−∫ABe(p)Vi(p)dA(p)−∫A(π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))Vi(p)dA(p)
First, we would like to prove that ∫A(j=1∑nBjVj(p))Vi(p)dA(p)=BiAi.
By Linearity Property, we have
∫A(j=1∑nBjVj(p))Vi(p)dA(p)=j=1∑n∫ABjVj(p)Vi(p)dA(p).
Since Vj(p)={10p∈Ajp∈/Aj
, we have j=1∑n∫ABjVj(p)Vi(p)dA(p)=∫ABiVi(p)Vi(p)dA(p)=∫AiBidA(p)=BiAi
Second, we would like to prove that ∫ABe(p)Vi(p)dA(p)=BieAi.
Since Vj(p)={10p∈Ajp∈/Aj
, we have ∫ABe(p)Vi(p)dA(p)=∫AiBe(p)dA(p).
Since Be(p) is the assumed to be the constant
Bie over the ith patch surface, we have ∫AiBe(p)dA(p)=BieAi.
Third, we would like to prove that ∫A(π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))Vi(p)dA(p)=Aiρihdj=1∑nFijBj.
By Linearity Property, we have
∫A(π1ρhd(p)∫A(j=1∑nBjVj(p))G(p′→p)dA(p′))Vi(p)dA(p)=j=1∑n∫A(π1ρhd(p)∫ABjVj(p)G(p′→p)dA(p′))Vi(p)dA(p).
Since Vi(p)={10p∈Aip∈/Ai
and Vj(p)={10p∈Ajp∈/Aj
, we have j=1∑n∫A(π1ρhd(p)∫ABjVj(p)G(p′→p)dA(p′))Vi(p)dA(p)=j=1∑n∫Ai(π1ρhd(p)∫AjBjG(p′→p)dA(p′))dA(p).
Since ρhd(p) is the assumed to be the constant
ρihd over the ith patch surface, we have j=1∑n∫Ai(π1ρhd(p)∫AjBjG(p′→p)dA(p′))dA(p)=ρihdj=1∑nπ1Bj∫Ai(∫AjG(p′→p)dA(p′))dA(p)=Aiρihdj=1∑n(Ai1π1∫Ai∫AjG(p′→p)dA(p′)dA(p))Bj=Aiρihdj=1∑nFijBj