LPV (Light Propagation Volumes)
RSM (Reflective Shadow Map)
Radiometric and Photometric quantities
Quantity
Radiometric Name
Radiometric Unit
Photometric Name
Photometric Unit
Power
\displaystyle \text{Power}
Power
Radiant Flux
Φ
\displaystyle \mathrm{\Phi}
Φ
W
\displaystyle W
W
Luminous Flux
Φ
\displaystyle \mathrm{\Phi}
Φ
Lumen
l
m
\displaystyle \mathrm{lm}
lm
Power
Solid Angle
\displaystyle
\frac{\text{Power}}{\text{Solid Angle}}
Solid Angle Power
Radiant Intensity
I
\displaystyle \mathrm{I}
I
W
s
r
\displaystyle \frac{W}{\mathrm{sr}}
sr W
Luminous Intensity
I
\displaystyle \mathrm{I}
I
Candela
c
d
\displaystyle \mathrm{cd}
cd
Power
Area
\displaystyle
\frac{\text{Power}}{\text{Area}}
Area Power
Radiant Exitance
M
\displaystyle \mathrm{M}
M
B
\displaystyle \mathrm{B}
B
W
m
2
\displaystyle \frac{W}{m^2}
m 2 W
Luminous Exitance
M
\displaystyle \mathrm{M}
M
B
\displaystyle \mathrm{B}
B
Lux
l
x
\displaystyle \mathrm{lx}
lx
Power
Area
\displaystyle
\frac{\text{Power}}{\text{Area}}
Area Power
Irradiance
E
\displaystyle \mathrm{E}
E
W
m
2
\displaystyle \frac{W}{m^2}
m 2 W
Illuminance
E
\displaystyle \mathrm{E}
E
Lux
l
x
\displaystyle \mathrm{lx}
lx
Power
Area
⋅
Solid Angle
\displaystyle
\frac{\text{Power}}{\text{Area} \cdot \text{Solid Angle}}
Area ⋅ Solid Angle Power
Radiance
L
\displaystyle \mathrm{L}
L
W
m
2
⋅
s
r
\displaystyle \frac{W}{m^2 \cdot
\mathrm{sr}}
m 2 ⋅ sr W
Luminance
L
\displaystyle \mathrm{L}
L
Nit
n
t
\displaystyle \mathrm{nt}
nt
For directional light, by "4.6 Sun" of [Lagarde 2014], the illuminance
E
\displaystyle \mathrm{E}
E
For point light, by "4.4 Punctual lights" [Lagarde 2014], the luminous flux
Φ
\displaystyle \mathrm{\Phi}
Φ
I
=
Φ
4
π
\displaystyle \mathrm{I} = \frac{\mathrm{\Phi}}{4
\pi}
I = 4 π Φ
E
=
I
distance
2
\displaystyle \mathrm{E} =
\frac{\mathrm{I}}{{\text{distance}}^2}
E = distance 2 I
E
\displaystyle \mathrm{E}
E
SH (Spherical Harmonics)
SH Basis
Let
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
Υ l m ( ω
)
The SH basis function
Υ
l
0
(
ω
→
)
\displaystyle
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega})
Υ l 0 ( ω
) ZH (zonal harmonics) .
By "Appendix A2" of [Sloan 2008], we have the polynomial forms of SH basis
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
Υ l m ( ω
) sh_eval_basis_1
in DirectXMath, and SHBasisFunction
in UE4.
Note that the direction vector
ω
→
=
[
x
y
z
]
\displaystyle \overrightarrow{\omega} =
\begin{bmatrix} x & y & z\end{bmatrix}
ω
= [ x y z ] normalized before using the polynomial forms. By "13.5.3 Spherical Coordinates" of PBR
Book V3 and "Spherical Coordinates" of "3.8.3 Spherical Parameterizations" of PBR
Book V4 , we have
ω
→
=
[
x
y
z
]
=
[
sin
θ
cos
ϕ
sin
θ
sin
ϕ
cos
θ
]
\displaystyle \overrightarrow{\omega} =
\begin{bmatrix} x & y & z\end{bmatrix} = \begin{bmatrix} \sin \theta \cos \phi
& \sin \theta \sin \phi & \cos \theta \end{bmatrix}
ω
= [ x y z ] = [ sin θ cos ϕ sin θ sin ϕ cos θ ]
ϕ
\displaystyle \phi
ϕ
θ
\displaystyle \theta
θ
θ
\displaystyle \theta
θ
ϕ
\displaystyle \phi
ϕ is the zenith).
l
m
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
Υ l m ( ω
)
0
0
1
2
π
=
0.282094791773878140
\displaystyle \frac{1}{2 \sqrt{\pi}} =
0.282094791773878140
2 π
1 = 0.282094791773878140
1
-1
−
3
2
π
y
=
−
0.488602511902919920
y
\displaystyle - \frac{\sqrt{3}}{2
\sqrt{\pi}} y = -0.488602511902919920 y
− 2 π
3
y = − 0.488602511902919920 y
1
0
3
2
π
z
=
0.488602511902919920
z
\displaystyle \frac{\sqrt{3}}{2
\sqrt{\pi}} z = 0.488602511902919920 z
2 π
3
z = 0.488602511902919920 z
1
1
−
3
2
π
x
=
−
0.488602511902919920
x
\displaystyle - \frac{\sqrt{3}}{2
\sqrt{\pi}} x = -0.488602511902919920 x
− 2 π
3
x = − 0.488602511902919920 x
SH Rotation
Let
R
\displaystyle \mathrm{R}
R
Υ
l
m
(
R
ω
→
)
=
∑
j
=
0
2
l
D
m
j
l
(
R
)
Υ
l
j
−
l
(
ω
→
)
\displaystyle
\operatorname{\Upsilon_l^m}(\mathrm{R} \overrightarrow{\omega}) = \sum_{j = 0}^{2 l}
\operatorname{D_{mj}^l}(\mathrm{R}) \operatorname{\Upsilon_l^{j -
l}}(\overrightarrow{\omega})
Υ l m ( R ω
) = j = 0 ∑ 2 l D mj l ( R ) Υ l j − l ( ω
)
D
l
(
R
)
\displaystyle \operatorname{D_l}(\mathrm{R})
D l ( R ) Wigner D-matrix .
This means that
[
Υ
l
−
l
(
R
ω
→
)
⋮
Υ
l
0
(
R
ω
→
)
⋮
Υ
l
l
(
R
ω
→
)
]
=
D
l
(
R
)
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\mathrm{R} \overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\mathrm{R} \overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\mathrm{R} \overrightarrow{\omega}) \end{bmatrix} =
\operatorname{D_l}(\mathrm{R}) \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
⎣
⎡ Υ l − l ( R ω
) ⋮ Υ l 0 ( R ω
) ⋮ Υ l l ( R ω
) ⎦
⎤ = D l ( R ) ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
By "Appendix: SH Rotation" of [Kautz 2002], for each degree (or band) l, each element of the
Wigner D-matrix can be calculated as
D
i
j
l
(
R
)
=
∫
S
2
Υ
l
i
−
l
(
R
ω
→
)
Υ
l
j
−
l
(
ω
→
)
d
ω
→
\displaystyle \operatorname{D_{ij}^l}(\mathrm{R}) =
\int_{\mathrm{S}^2} \operatorname{\Upsilon_l^{i - l}}(\mathrm{R}
\overrightarrow{\omega}) \operatorname{\Upsilon_l^{j - l}}(\overrightarrow{\omega}) \,
d\overrightarrow{\omega}
D ij l ( R ) = ∫ S 2 Υ l i − l ( R ω
) Υ l j − l ( ω
) d ω
For l = 0, we have
D
00
0
=
∫
S
2
Υ
0
0
(
R
ω
→
)
Υ
0
0
(
ω
→
)
d
ω
→
=
∫
S
2
1
2
π
1
2
π
d
ω
→
=
1
4
π
∫
S
2
1
d
ω
→
=
1
4
π
4
π
=
1
\displaystyle \mathrm{D_{00}^0} =
\int_{\mathrm{S}^2} \operatorname{\Upsilon_0^0}(\mathrm{R} \overrightarrow{\omega})
\operatorname{\Upsilon_0^0}(\overrightarrow{\omega}) \, d\overrightarrow{\omega} =
\int_{\mathrm{S}^2} \frac{1}{2 \sqrt{\pi}} \frac{1}{2 \sqrt{\pi}} \,
d\overrightarrow{\omega} = \frac{1}{4\pi} \int_{\mathrm{S}^2} 1 \,
d\overrightarrow{\omega} = \frac{1}{4\pi} 4\pi = 1
D 00 0 = ∫ S 2 Υ 0 0 ( R ω
) Υ 0 0 ( ω
) d ω
= ∫ S 2 2 π
1 2 π
1 d ω
= 4 π 1 ∫ S 2 1 d ω
= 4 π 1 4 π = 1
D
l
(
R
)
=
[
1
]
\displaystyle \operatorname{D_l}(\mathrm{R}) =
\begin{bmatrix} 1 \end{bmatrix}
D l ( R ) = [ 1 ]
For l = 1, it is too complex to calculate the intergral for each element of the Wigner D-matrix. The
trick by [Hable 2014] can be used to calculate the Wigner D-matrix. Since the equation
[
Υ
1
−
1
(
R
ω
→
)
Υ
1
0
(
R
ω
→
)
Υ
1
1
(
R
ω
→
)
]
=
D
l
(
R
)
[
Υ
1
−
1
(
ω
→
)
Υ
1
0
(
ω
→
)
Υ
1
1
(
ω
→
)
]
\displaystyle \begin{bmatrix}
\operatorname{\Upsilon_1^{-1}}(\mathrm{R} \overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^0}(\mathrm{R} \overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^1}(\mathrm{R} \overrightarrow{\omega}) \end{bmatrix} =
\operatorname{D_l}(\mathrm{R}) \begin{bmatrix}
\operatorname{\Upsilon_1^-1}(\overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^0}(\overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^1}(\overrightarrow{\omega}) \end{bmatrix}
⎣
⎡ Υ 1 − 1 ( R ω
) Υ 1 0 ( R ω
) Υ 1 1 ( R ω
) ⎦
⎤ = D l ( R ) ⎣
⎡ Υ 1 − 1 ( ω
) Υ 1 0 ( ω
) Υ 1 1 ( ω
) ⎦
⎤
ω
→
\displaystyle \overrightarrow{\omega}
ω
[
1
0
0
]
\displaystyle \begin{bmatrix} 1 \\ 0 \\ 0
\end{bmatrix}
⎣
⎡ 1 0 0 ⎦
⎤ ,
[
0
1
0
]
\displaystyle \begin{bmatrix} 0 \\ 1 \\ 0
\end{bmatrix}
⎣
⎡ 0 1 0 ⎦
⎤
[
0
0
1
]
\displaystyle \begin{bmatrix} 0 \\ 0 \\ 1
\end{bmatrix}
⎣
⎡ 0 0 1 ⎦
⎤ polynomial forms of SH basis, we have
[
Υ
1
−
1
(
R
ω
→
)
Υ
1
0
(
R
ω
→
)
Υ
1
1
(
R
ω
→
)
]
=
D
l
(
R
)
[
Υ
1
−
1
(
ω
→
)
Υ
1
0
(
ω
→
)
Υ
1
1
(
ω
→
)
]
⇒
\displaystyle \begin{bmatrix}
\operatorname{\Upsilon_1^{-1}}(\mathrm{R} \overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^0}(\mathrm{R} \overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^1}(\mathrm{R} \overrightarrow{\omega}) \end{bmatrix} =
\operatorname{D_l}(\mathrm{R}) \begin{bmatrix}
\operatorname{\Upsilon_1^-1}(\overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^0}(\overrightarrow{\omega}) \\
\operatorname{\Upsilon_1^1}(\overrightarrow{\omega}) \end{bmatrix} \Rightarrow
⎣
⎡ Υ 1 − 1 ( R ω
) Υ 1 0 ( R ω
) Υ 1 1 ( R ω
) ⎦
⎤ = D l ( R ) ⎣
⎡ Υ 1 − 1 ( ω
) Υ 1 0 ( ω
) Υ 1 1 ( ω
) ⎦
⎤ ⇒
[
0
−
3
2
π
0
0
0
3
2
π
−
3
2
π
0
0
]
R
ω
→
=
D
l
(
R
)
[
0
−
3
2
π
0
0
0
3
2
π
−
3
2
π
0
0
]
ω
→
⇒
[
0
−
3
2
π
0
0
0
3
2
π
−
3
2
π
0
0
]
R
[
1
0
0
0
1
0
0
0
1
]
=
D
l
(
R
)
[
0
−
3
2
π
0
0
0
3
2
π
−
3
2
π
0
0
]
[
1
0
0
0
1
0
0
0
1
]
\displaystyle \color{red} \begin{bmatrix} 0 & -
\frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 \\ 0 & 0 & \frac{\sqrt{3}}{2 \sqrt{\pi}}
\\ - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 & 0 \end{bmatrix} \mathrm{R}
\color{green} \overrightarrow{\omega} \color{red} = \operatorname{D_l}(\mathrm{R})
\begin{bmatrix} 0 & - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 \\ 0 & 0 &
\frac{\sqrt{3}}{2 \sqrt{\pi}} \\ - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 & 0
\end{bmatrix} \color{green} \overrightarrow{\omega} \color{red} \Rightarrow
\begin{bmatrix} 0 & - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 \\ 0 & 0 &
\frac{\sqrt{3}}{2 \sqrt{\pi}} \\ - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 & 0
\end{bmatrix} \mathrm{R} \color{green} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1
& 0 \\ 0 & 0 & 1 \end{bmatrix} \color{red} = \operatorname{D_l}(\mathrm{R})
\begin{bmatrix} 0 & - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 \\ 0 & 0 &
\frac{\sqrt{3}}{2 \sqrt{\pi}} \\ - \frac{\sqrt{3}}{2 \sqrt{\pi}} & 0 & 0
\end{bmatrix} \color{green} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0
& 0 & 1 \end{bmatrix} \color{red}
⎣
⎡ 0 0 − 2 π
3
− 2 π
3
0 0 0 2 π
3
0 ⎦
⎤ R ω
= D l ( R ) ⎣
⎡ 0 0 − 2 π
3
− 2 π
3
0 0 0 2 π
3
0 ⎦
⎤ ω
⇒ ⎣
⎡ 0 0 − 2 π
3
− 2 π
3
0 0 0 2 π
3
0 ⎦
⎤ R ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤ = D l ( R ) ⎣
⎡ 0 0 − 2 π
3
− 2 π
3
0 0 0 2 π
3
0 ⎦
⎤ ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤
⇒
[
0
−
1
0
0
0
1
−
1
0
0
]
R
[
1
0
0
0
1
0
0
0
1
]
=
D
l
(
R
)
[
0
−
1
0
0
0
1
−
1
0
0
]
[
1
0
0
0
1
0
0
0
1
]
\displaystyle \Rightarrow \begin{bmatrix} 0 &
-1 & 0 \\ 0 & 0 & 1 \\ -1 & 0 & 0 \end{bmatrix} \mathrm{R}
\begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1
\end{bmatrix} = \operatorname{D_l}(\mathrm{R}) \begin{bmatrix} 0 & -1 & 0 \\ 0
& 0 & 1 \\ -1 & 0 & 0 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 \\
0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}
⇒ ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ R ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤ = D l ( R ) ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤
[
0
−
1
0
0
0
1
−
1
0
0
]
[
1
0
0
0
1
0
0
0
1
]
\displaystyle \begin{bmatrix} 0 & -1 & 0 \\
0 & 0 & 1 \\ -1 & 0 & 0 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0
\\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}
⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤
D
l
(
R
)
=
[
0
−
1
0
0
0
1
−
1
0
0
]
R
[
1
0
0
0
1
0
0
0
1
]
(
[
0
−
1
0
0
0
1
−
1
0
0
]
[
1
0
0
0
1
0
0
0
1
]
)
−
1
=
[
0
−
1
0
0
0
1
−
1
0
0
]
R
[
1
0
0
0
1
0
0
0
1
]
[
0
0
−
1
−
1
0
0
0
1
0
]
=
[
0
−
1
0
0
0
1
−
1
0
0
]
R
[
0
0
−
1
−
1
0
0
0
1
0
]
=
[
−
R
10
−
R
11
−
R
12
R
20
R
21
R
22
−
R
00
−
R
01
−
R
02
]
[
0
0
−
1
−
1
0
0
0
1
0
]
=
[
R
11
−
R
12
R
10
−
R
21
R
22
−
R
20
R
01
−
R
02
R
00
]
\displaystyle \operatorname{D_l}(\mathrm{R}) =
\begin{bmatrix} 0 & -1 & 0 \\ 0 & 0 & 1 \\ -1 & 0 & 0
\end{bmatrix} \mathrm{R} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0
& 0 & 1 \end{bmatrix} {\left \lparen \begin{bmatrix} 0 & -1 & 0 \\ 0
& 0 & 1 \\ -1 & 0 & 0 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 \\
0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \right \rparen}^{-1} =
\begin{bmatrix} 0 & -1 & 0 \\ 0 & 0 & 1 \\ -1 & 0 & 0
\end{bmatrix} \mathrm{R} \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0
& 0 & 1 \end{bmatrix} \begin{bmatrix} 0 & 0 & -1 \\ -1 & 0 & 0
\\ 0 & 1 & 0 \end{bmatrix} = \begin{bmatrix} 0 & -1 & 0 \\ 0 & 0
& 1 \\ -1 & 0 & 0 \end{bmatrix} \mathrm{R} \begin{bmatrix} 0 & 0 &
-1 \\ -1 & 0 & 0 \\ 0 & 1 & 0 \end{bmatrix} = \begin{bmatrix}
-{\mathrm{R}}_{10} & -{\mathrm{R}}_{11} & -{\mathrm{R}}_{12} \\
{\mathrm{R}}_{20} & {\mathrm{R}}_{21} & {\mathrm{R}}_{22} \\ -{\mathrm{R}}_{00}
& -{\mathrm{R}}_{01} & -{\mathrm{R}}_{02} \end{bmatrix} \begin{bmatrix} 0 &
0 & -1 \\ -1 & 0 & 0 \\ 0 & 1 & 0 \end{bmatrix} = \begin{bmatrix}
{\mathrm{R}}_{11} & -{\mathrm{R}}_{12} & {\mathrm{R}}_{10} \\ -{\mathrm{R}}_{21}
& {\mathrm{R}}_{22} & -{\mathrm{R}}_{20} \\ {\mathrm{R}}_{01} &
-{\mathrm{R}}_{02} & {\mathrm{R}}_{00} \end{bmatrix}
D l ( R ) = ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ R ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤ ⎝
⎛ ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤ ⎠
⎞ − 1 = ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ R ⎣
⎡ 1 0 0 0 1 0 0 0 1 ⎦
⎤ ⎣
⎡ 0 − 1 0 0 0 1 − 1 0 0 ⎦
⎤ = ⎣
⎡ 0 0 − 1 − 1 0 0 0 1 0 ⎦
⎤ R ⎣
⎡ 0 − 1 0 0 0 1 − 1 0 0 ⎦
⎤ = ⎣
⎡ − R 10 R 20 − R 00 − R 11 R 21 − R 01 − R 12 R 22 − R 02 ⎦
⎤ ⎣
⎡ 0 − 1 0 0 0 1 − 1 0 0 ⎦
⎤ = ⎣
⎡ R 11 − R 21 R 01 − R 12 R 22 − R 02 R 10 − R 20 R 00 ⎦
⎤
The Wigner D-matrix is calculated by DirectX::XMSHRotate
and DirectX::XMSHRotateZ
in DirectXMath.
l
D
l
(
R
)
\displaystyle
\operatorname{D_l}(\mathrm{R})
D l ( R )
0
[
1
]
\displaystyle \begin{bmatrix} 1
\end{bmatrix}
[ 1 ]
1
[
R
11
−
R
12
R
10
−
R
21
R
22
−
R
20
R
01
−
R
02
R
00
]
\displaystyle \begin{bmatrix}
{\mathrm{R}}_{11} & -{\mathrm{R}}_{12} & {\mathrm{R}}_{10} \\
-{\mathrm{R}}_{21} & {\mathrm{R}}_{22} & -{\mathrm{R}}_{20} \\
{\mathrm{R}}_{01} & -{\mathrm{R}}_{02} & {\mathrm{R}}_{00}
\end{bmatrix}
⎣
⎡ R 11 − R 21 R 01 − R 12 R 22 − R 02 R 10 − R 20 R 00 ⎦
⎤
SH Projection
Let
S
H
\displaystyle \operatorname{\mathcal{SH}}
S H SH (Spherical Harmonics) projection operation . Analogous to the Fourier
transform , we have
f
l
m
=
S
H
(
f
(
ω
→
)
)
=
∫
S
2
f
(
ω
→
)
Υ
l
m
(
ω
→
)
d
ω
→
\displaystyle f_l^m =
\operatorname{\mathcal{SH}}(\operatorname{f}(\overrightarrow{\omega})) =
\int_{\mathrm{S}^2} \operatorname{f}(\overrightarrow{\omega})
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) \, d\overrightarrow{\omega}
f l m = S H ( f ( ω
)) = ∫ S 2 f ( ω
) Υ l m ( ω
) d ω
f
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
l
m
Υ
l
m
(
ω
→
)
=
∑
l
=
0
∞
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle
\operatorname{f}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m = -l}^l f_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin}
\begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots & f_l^l \end{bmatrix}
\begin{bmatrix} \operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
f ( ω
) = l = 0 ∑ ∞ m = − l ∑ l f l m Υ l m ( ω
) = l = 0 ∑ ∞ [ f l − l ⋯ f l 0 ⋯ f l l ] ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
SH Rotational Invariance
Let
R
\displaystyle \mathrm{R}
R
f
′
(
ω
→
)
=
f
(
R
ω
→
)
\displaystyle
\operatorname{f'}(\overrightarrow{\omega}) =
\operatorname{f}(\mathrm{R}\overrightarrow{\omega})
f ′ ( ω
) = f ( R ω
)
f
′
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
′
l
m
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{f'}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m = -l}^l
{f'}_l^m \operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
f ′ ( ω
) = l = 0 ∑ ∞ m = − l ∑ l f ′ l m Υ l m ( ω
)
[
f
′
l
−
l
⋯
f
′
l
0
⋯
f
′
l
l
]
=
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
D
l
(
R
)
\displaystyle \begin{bmatrix} {f'}_l^{-l}
& \cdots & {f'}_l^0 & \cdots & {f'}_l^l \end{bmatrix} =
\begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots & f_l^l \end{bmatrix}
\operatorname{D_l}(\mathrm{R})
[ f ′ l − l ⋯ f ′ l 0 ⋯ f ′ l l ] = [ f l − l ⋯ f l 0 ⋯ f l l ] D l ( R )
D
l
(
R
)
\displaystyle \operatorname{D_l}(\mathrm{R})
D l ( R )
Proof
By "SH Projection", we have
f
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
l
m
Υ
l
m
(
ω
→
)
=
∑
l
=
0
∞
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle
\operatorname{f}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m = -l}^l
f_l^m \operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin}
\begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots & f_l^l
\end{bmatrix} \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
f ( ω
) = l = 0 ∑ ∞ m = − l ∑ l f l m Υ l m ( ω
) = l = 0 ∑ ∞ [ f l − l ⋯ f l 0 ⋯ f l l ] ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
By "SH Rotation", we have
[
Υ
l
−
l
(
R
ω
→
)
⋮
Υ
l
0
(
R
ω
→
)
⋮
Υ
l
l
(
R
ω
→
)
]
=
D
l
(
R
)
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\mathrm{R} \overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\mathrm{R} \overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\mathrm{R} \overrightarrow{\omega}) \end{bmatrix} =
\operatorname{D_l}(\mathrm{R}) \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
⎣
⎡ Υ l − l ( R ω
) ⋮ Υ l 0 ( R ω
) ⋮ Υ l l ( R ω
) ⎦
⎤ = D l ( R ) ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
This means that
f
′
(
ω
→
)
=
f
(
R
ω
→
)
=
∑
l
=
0
∞
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
[
Υ
l
−
l
(
R
ω
→
)
⋮
Υ
l
0
(
R
ω
→
)
⋮
Υ
l
l
(
R
ω
→
)
]
=
∑
l
=
0
∞
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
D
l
(
R
)
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle
\operatorname{f'}(\overrightarrow{\omega}) =
\operatorname{f}(\mathrm{R}\overrightarrow{\omega}) = \sum_{l = 0}^{\infin}
\begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots & f_l^l
\end{bmatrix} \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\mathrm{R}\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\mathrm{R}\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\mathrm{R}\overrightarrow{\omega}) \end{bmatrix} =
\sum_{l = 0}^{\infin} \begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots
& f_l^l \end{bmatrix} \operatorname{D_l}(\mathrm{R}) \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
f ′ ( ω
) = f ( R ω
) = l = 0 ∑ ∞ [ f l − l ⋯ f l 0 ⋯ f l l ] ⎣
⎡ Υ l − l ( R ω
) ⋮ Υ l 0 ( R ω
) ⋮ Υ l l ( R ω
) ⎦
⎤ = l = 0 ∑ ∞ [ f l − l ⋯ f l 0 ⋯ f l l ] D l ( R ) ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
D
l
(
R
)
\displaystyle \operatorname{D_l}(\mathrm{R})
D l ( R )
Since
f
′
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
′
l
m
Υ
l
m
(
ω
→
)
=
∑
l
=
0
∞
[
f
′
l
−
l
⋯
f
′
l
0
⋯
f
′
l
l
]
[
Υ
l
−
l
(
ω
→
)
⋮
Υ
l
0
(
ω
→
)
⋮
Υ
l
l
(
ω
→
)
]
\displaystyle
\operatorname{f'}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m =
-l}^l {f'}_l^m \operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) = \sum_{l =
0}^{\infin} \begin{bmatrix} {f'}_l^{-l} & \cdots & {f'}_l^0 &
\cdots & {f'}_l^l \end{bmatrix} \begin{bmatrix}
\operatorname{\Upsilon_l^{-l}}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^0}(\overrightarrow{\omega}) \\ \vdots \\
\operatorname{\Upsilon_l^l}(\overrightarrow{\omega}) \end{bmatrix}
f ′ ( ω
) = l = 0 ∑ ∞ m = − l ∑ l f ′ l m Υ l m ( ω
) = l = 0 ∑ ∞ [ f ′ l − l ⋯ f ′ l 0 ⋯ f ′ l l ] ⎣
⎡ Υ l − l ( ω
) ⋮ Υ l 0 ( ω
) ⋮ Υ l l ( ω
) ⎦
⎤
[
f
′
l
−
l
⋯
f
′
l
0
⋯
f
′
l
l
]
=
[
f
l
−
l
⋯
f
l
0
⋯
f
l
l
]
D
l
(
R
)
\displaystyle \begin{bmatrix} {f'}_l^{-l}
& \cdots & {f'}_l^0 & \cdots & {f'}_l^l \end{bmatrix} =
\begin{bmatrix} f_l^{-l} & \cdots & f_l^0 & \cdots & f_l^l
\end{bmatrix} \operatorname{D_l}(\mathrm{R})
[ f ′ l − l ⋯ f ′ l 0 ⋯ f ′ l l ] = [ f l − l ⋯ f l 0 ⋯ f l l ] D l ( R )
SH Product Integration
Let
f
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
l
m
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{f}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m = -l}^l f_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
f ( ω
) = l = 0 ∑ ∞ m = − l ∑ l f l m Υ l m ( ω
)
g
(
ω
→
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
g
l
m
Υ
l
m
(
ω
→
)
\displaystyle
\operatorname{g}(\overrightarrow{\omega}) = \sum_{l = 0}^{\infin} \sum_{m = -l}^l g_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})
g ( ω
) = l = 0 ∑ ∞ m = − l ∑ l g l m Υ l m ( ω
)
∫
S
2
f
(
ω
→
)
g
(
ω
→
)
d
ω
→
=
∫
S
2
(
∑
l
=
0
∞
∑
m
=
−
l
l
f
l
m
Υ
l
m
(
ω
→
)
)
(
∑
l
=
0
∞
∑
m
=
−
l
l
g
l
m
Υ
l
m
(
ω
→
)
)
d
ω
→
=
∑
l
=
0
∞
∑
m
=
−
l
l
f
l
m
g
l
m
\displaystyle \int_{\mathrm{S}^2}
\operatorname{f}(\overrightarrow{\omega}) \operatorname{g}(\overrightarrow{\omega}) \,
d\overrightarrow{\omega} = \int_{\mathrm{S}^2} \left \lparen \sum_{l = 0}^{\infin}
\sum_{m = -l}^l f_l^m \operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) \right
\rparen \left \lparen \sum_{l = 0}^{\infin} \sum_{m = -l}^l g_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) \right \rparen \,
d\overrightarrow{\omega} = \sum_{l = 0}^{\infin} \sum_{m = -l}^l f_l^m g_l^m
∫ S 2 f ( ω
) g ( ω
) d ω
= ∫ S 2 ( l = 0 ∑ ∞ m = − l ∑ l f l m Υ l m ( ω
) ) ( l = 0 ∑ ∞ m = − l ∑ l g l m Υ l m ( ω
) ) d ω
= l = 0 ∑ ∞ m = − l ∑ l f l m g l m
SH Product Projection
Actually, "SH Product Projection" is related to the Clebsch–Gordan
coefficients which is too complex to be used in rendering. We only need to know that "SH
Product Projection" should be distinguished from "SH Product Integration".
Let
h
(
ω
→
)
=
f
(
ω
→
)
g
(
ω
→
)
\displaystyle
\operatorname{h}(\overrightarrow{\omega}) = \operatorname{f}(\overrightarrow{\omega})
\operatorname{g}(\overrightarrow{\omega})
h ( ω
) = f ( ω
) g ( ω
)
h
l
m
=
∫
S
2
h
(
ω
→
)
Υ
l
m
(
ω
→
)
d
ω
→
=
∫
S
2
f
(
ω
→
)
g
(
ω
→
)
Υ
l
m
(
ω
→
)
d
ω
→
≠
∫
S
2
f
(
ω
→
)
g
(
ω
→
)
d
ω
→
\displaystyle h_l^m = \int_{\mathrm{S}^2}
\operatorname{h}(\overrightarrow{\omega})
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) \, d\overrightarrow{\omega} =
\int_{\mathrm{S}^2} \operatorname{f}(\overrightarrow{\omega})
\operatorname{g}(\overrightarrow{\omega})
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega}) \, d\overrightarrow{\omega} \ne
\int_{\mathrm{S}^2} \operatorname{f}(\overrightarrow{\omega})
\operatorname{g}(\overrightarrow{\omega}) \, d\overrightarrow{\omega}
h l m = ∫ S 2 h ( ω
) Υ l m ( ω
) d ω
= ∫ S 2 f ( ω
) g ( ω
) Υ l m ( ω
) d ω
= ∫ S 2 f ( ω
) g ( ω
) d ω
SH Analytic Light
Light Distribution
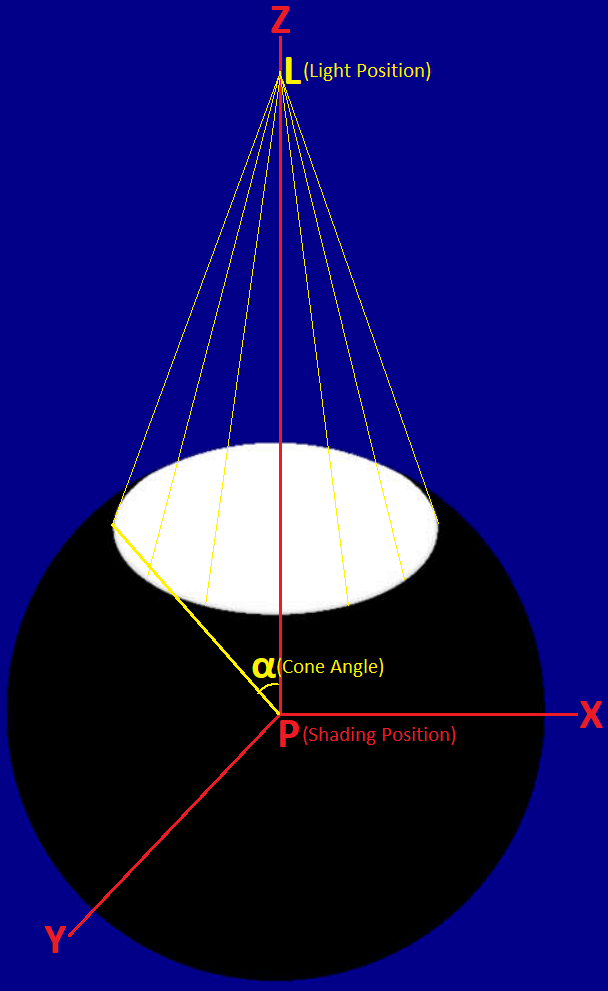
By "SH Light Sources" of [Green 2003], the light position is at the Z axis and the light
distribution at the shading position is
L
(
ω
→
)
=
{
1
θ
<
α
0
θ
≥
α
\displaystyle
\operatorname{L}(\overrightarrow{\omega}) = \begin{cases} 1 & \theta < \alpha \\
0 & \theta \geq \alpha \end{cases}
L ( ω
) = { 1 0 θ < α θ ≥ α
α
\displaystyle \alpha
α
Due to circular symmetry of the light distribution at the shading position, only the coefficients on
the ZH(Zonal Harmonics) of the light distribution are non-zero.
By "Appendix A3 ZH Coefficients for Spherical Light Source" of [Sloan 2008], we have the
coefficients on the ZH(Zonal Harmonics) of the light distribution.
By "13.5.3 Spherical Coordinates" of PBR
Book V3 and "Equation (2.23)" of PBR
Book V4 , we have
∫
Ω
α
f
(
ω
→
)
d
ω
→
=
∫
0
2
π
(
∫
0
α
f
(
θ
,
ϕ
)
sin
θ
d
θ
)
d
ϕ
\displaystyle \int_{\Omega_\alpha}
\operatorname{f}(\overrightarrow{\omega}) \, d \overrightarrow{\omega} = \int_0^{2\pi}
\left\lparen \int_0^{\alpha} \operatorname{f}(\theta, \phi) \sin \theta \, d \theta
\right\rparen \, d \phi
∫ Ω α f ( ω
) d ω
= ∫ 0 2 π ( ∫ 0 α f ( θ , ϕ ) sin θ d θ ) d ϕ
For l = 0, we have
L
0
=
∫
S
2
L
(
ω
→
)
Υ
0
0
(
ω
→
)
d
ω
→
=
∫
S
2
L
(
ω
→
)
1
2
π
d
ω
→
=
1
2
π
∫
S
2
L
(
ω
→
)
d
ω
→
=
1
2
π
∫
Ω
α
1
d
ω
→
=
1
2
π
∫
0
2
π
(
∫
0
α
sin
θ
d
θ
)
d
ϕ
=
1
2
π
∫
0
2
π
(
(
−
cos
α
)
−
(
−
cos
0
)
)
d
ϕ
=
1
2
π
∫
0
2
π
(
1
−
cos
α
)
d
ϕ
=
1
2
π
(
1
−
cos
α
)
∫
0
2
π
1
d
ϕ
=
1
2
π
(
1
−
cos
α
)
2
π
=
π
(
1
−
cos
α
)
\displaystyle \mathrm{L_0} = \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega})
\operatorname{\Upsilon_0^0}(\overrightarrow{\omega}) \, d \overrightarrow{\omega} =
\int_{\mathrm{S}^2} \operatorname{L}(\overrightarrow{\omega}) \frac{1}{2 \sqrt{\pi}} \,
d \overrightarrow{\omega} = \frac{1}{2 \sqrt{\pi}} \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega}) \, d \overrightarrow{\omega} = \frac{1}{2
\sqrt{\pi}} \int_{\Omega_\alpha} 1 \, d \overrightarrow{\omega} = \frac{1}{2 \sqrt{\pi}}
\int_0^{2\pi} \left\lparen \int_0^{\alpha} \sin \theta \, d \theta \right\rparen \, d
\phi = \frac{1}{2 \sqrt{\pi}} \int_0^{2\pi} ( (-\cos \alpha) - (-\cos 0) ) \, d \phi =
\frac{1}{2 \sqrt{\pi}} \int_0^{2\pi} (1 - \cos \alpha) \, d \phi = \frac{1}{2
\sqrt{\pi}} (1 - \cos \alpha) \int_0^{2\pi} 1 \, d \phi = \frac{1}{2 \sqrt{\pi}} (1 -
\cos \alpha) 2 \pi = \sqrt{\pi} (1 - \cos \alpha)
L 0 = ∫ S 2 L ( ω
) Υ 0 0 ( ω
) d ω
= ∫ S 2 L ( ω
) 2 π
1 d ω
= 2 π
1 ∫ S 2 L ( ω
) d ω
= 2 π
1 ∫ Ω α 1 d ω
= 2 π
1 ∫ 0 2 π ( ∫ 0 α sin θ d θ ) d ϕ = 2 π
1 ∫ 0 2 π (( − cos α ) − ( − cos 0 )) d ϕ = 2 π
1 ∫ 0 2 π ( 1 − cos α ) d ϕ = 2 π
1 ( 1 − cos α ) ∫ 0 2 π 1 d ϕ = 2 π
1 ( 1 − cos α ) 2 π = π
( 1 − cos α )
For l = 1, we have
L
1
=
∫
S
2
L
(
ω
→
)
Υ
1
0
(
ω
→
)
d
ω
→
=
∫
S
2
L
(
ω
→
)
3
2
π
z
d
ω
→
=
3
2
π
∫
S
2
L
(
ω
→
)
z
d
ω
→
=
3
2
π
∫
Ω
α
cos
θ
d
ω
→
=
3
2
π
∫
0
2
π
(
∫
0
α
cos
θ
sin
θ
d
θ
)
d
ϕ
=
3
2
π
∫
0
2
π
(
∫
0
α
cos
θ
sin
θ
d
θ
)
d
ϕ
=
3
2
π
∫
0
2
π
(
sin
2
α
2
−
sin
2
0
2
)
d
ϕ
=
3
2
π
∫
0
2
π
sin
2
α
2
d
ϕ
=
3
2
π
sin
2
α
2
∫
0
2
π
1
d
ϕ
=
3
2
π
sin
2
α
2
2
π
=
3
π
2
sin
2
α
\displaystyle \mathrm{L_1} = \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega})
\operatorname{\Upsilon_1^0}(\overrightarrow{\omega}) \, d \overrightarrow{\omega} =
\int_{\mathrm{S}^2} \operatorname{L}(\overrightarrow{\omega}) \frac{\sqrt{3}}{2
\sqrt{\pi}} z \, d \overrightarrow{\omega} = \frac{\sqrt{3}}{2 \sqrt{\pi}}
\int_{\mathrm{S}^2} \operatorname{L}(\overrightarrow{\omega}) z \, d
\overrightarrow{\omega} = \frac{\sqrt{3}}{2 \sqrt{\pi}} \int_{\Omega_\alpha} \cos \theta
\, d \overrightarrow{\omega} = \frac{\sqrt{3}}{2 \sqrt{\pi}} \int_0^{2\pi} \left\lparen
\int_0^{\alpha} \cos \theta \sin \theta \, d \theta \right\rparen \, d \phi =
\frac{\sqrt{3}}{2 \sqrt{\pi}} \int_0^{2\pi} \left\lparen \int_0^{\alpha} \cos \theta
\sin \theta \, d \theta \right\rparen \, d \phi = \frac{\sqrt{3}}{2 \sqrt{\pi}}
\int_0^{2\pi} \left\lparen \frac{\sin^2 \alpha}{2} - \frac{\sin^2 0}{2} \right\rparen \,
d \phi = \frac{\sqrt{3}}{2 \sqrt{\pi}} \int_0^{2\pi} \frac{\sin^2 \alpha}{2} \, d \phi =
\frac{\sqrt{3}}{2 \sqrt{\pi}} \frac{\sin^2 \alpha}{2} \int_0^{2\pi} 1 \, d \phi =
\frac{\sqrt{3}}{2 \sqrt{\pi}} \frac{\sin^2 \alpha}{2} 2 \pi = \frac{\sqrt{3}
\sqrt{\pi}}{2} \sin^2 \alpha
L 1 = ∫ S 2 L ( ω
) Υ 1 0 ( ω
) d ω
= ∫ S 2 L ( ω
) 2 π
3
z d ω
= 2 π
3
∫ S 2 L ( ω
) z d ω
= 2 π
3
∫ Ω α cos θ d ω
= 2 π
3
∫ 0 2 π ( ∫ 0 α cos θ sin θ d θ ) d ϕ = 2 π
3
∫ 0 2 π ( ∫ 0 α cos θ sin θ d θ ) d ϕ = 2 π
3
∫ 0 2 π ( 2 sin 2 α − 2 sin 2 0 ) d ϕ = 2 π
3
∫ 0 2 π 2 sin 2 α d ϕ = 2 π
3
2 sin 2 α ∫ 0 2 π 1 d ϕ = 2 π
3
2 sin 2 α 2 π = 2 3
π
sin 2 α
The coefficients on the ZH(Zonal Harmonics) of the light distribution is calculated by ComputeCapInt in
DirectXMath.
Transfer Function
By "Normalization" of [Sloan 2008], the normalized clamped cosine
1
π
(
cos
θ
)
+
\displaystyle \frac{1}{\pi} (\cos \theta)^+
π 1 ( cos θ ) + transfer function ([Sloan 2002]).
Due to circular symmetry of the normalized clamped cosine, only the coefficients on the ZH(Zonal
Harmonics) of the normalized clamped cosine are non-zero.
By "Equation (8)" of [Ramamoorthi 2001 B] and "Normalization" of [Sloan 2008], we
have the coefficients on the ZH(Zonal Harmonics) of the light distribution.
For l = 0, by "5.5.1 Integrals over Projected Solid Angle" of PBR
Book V3 and "4.2.1 Integrals over Projected Solid Angle" of PBR
Book V4 , we have
T
0
=
∫
S
2
1
π
(
cos
θ
)
+
Υ
0
0
(
ω
→
)
d
ω
→
=
∫
S
2
1
π
(
cos
θ
)
+
1
2
π
d
ω
→
=
1
π
1
2
π
∫
S
2
(
cos
θ
)
+
d
ω
→
=
1
π
1
2
π
∫
H
2
1
d
ω
⊥
→
=
1
π
1
2
π
π
=
1
2
π
\displaystyle T_0 = \int_{\mathrm{S}^2}
\frac{1}{\pi} (\cos \theta)^+ \operatorname{\Upsilon_0^0}(\overrightarrow{\omega}) \, d
\overrightarrow{\omega} = \int_{\mathrm{S}^2} \frac{1}{\pi} (\cos \theta)^+ \frac{1}{2
\sqrt{\pi}} \, d \overrightarrow{\omega} = \frac{1}{\pi} \frac{1}{2
\sqrt{\pi}}\int_{\mathrm{S}^2} (\cos \theta)^+ \, d \overrightarrow{\omega} =
\frac{1}{\pi} \frac{1}{2 \sqrt{\pi}} \int_{\mathcal{H}^2} 1 \, d
\overrightarrow{\omega^{\perp}} = \frac{1}{\pi} \frac{1}{2 \sqrt{\pi}} \pi = \frac{1}{2
\sqrt{\pi}}
T 0 = ∫ S 2 π 1 ( cos θ ) + Υ 0 0 ( ω
) d ω
= ∫ S 2 π 1 ( cos θ ) + 2 π
1 d ω
= π 1 2 π
1 ∫ S 2 ( cos θ ) + d ω
= π 1 2 π
1 ∫ H 2 1 d ω ⊥
= π 1 2 π
1 π = 2 π
1
For l = 1, we have
T
1
=
∫
S
2
1
π
(
cos
θ
)
+
Υ
1
0
(
ω
→
)
d
ω
→
=
∫
S
2
1
π
(
cos
θ
)
+
3
2
π
z
d
ω
→
=
1
π
3
2
π
∫
S
2
(
cos
θ
)
+
z
d
ω
→
=
1
π
3
2
π
∫
H
2
cos
θ
cos
θ
d
ω
→
=
1
π
3
2
π
∫
0
2
π
(
∫
0
π
2
cos
θ
cos
θ
sin
θ
d
θ
)
d
ϕ
=
1
π
3
2
π
∫
0
2
π
(
(
−
cos
3
π
2
3
)
−
(
−
cos
3
0
3
)
)
d
ϕ
=
1
π
3
2
π
∫
0
2
π
1
3
d
ϕ
=
1
π
3
2
π
1
3
∫
0
2
π
1
d
ϕ
=
1
π
3
2
π
1
3
2
π
=
3
3
π
\displaystyle \mathrm{T_1} = \int_{\mathrm{S}^2}
\frac{1}{\pi} (\cos \theta)^+ \operatorname{\Upsilon_1^0}(\overrightarrow{\omega}) \, d
\overrightarrow{\omega} = \int_{\mathrm{S}^2} \frac{1}{\pi} (\cos \theta)^+
\frac{\sqrt{3}}{2 \sqrt{\pi}} z \, d \overrightarrow{\omega} = \frac{1}{\pi}
\frac{\sqrt{3}}{2 \sqrt{\pi}} \int_{\mathrm{S}^2} (\cos \theta)^+ z \, d
\overrightarrow{\omega} = \frac{1}{\pi} \frac{\sqrt{3}}{2 \sqrt{\pi}}
\int_{\mathcal{H}^2} \cos \theta \cos \theta \, d \overrightarrow{\omega} =
\frac{1}{\pi} \frac{\sqrt{3}}{2 \sqrt{\pi}} \int_0^{2\pi} \left\lparen
\int_0^{\frac{\pi}{2}} \cos \theta \cos \theta \sin \theta \, d \theta \right\rparen \,
d \phi = \frac{1}{\pi} \frac{\sqrt{3}}{2 \sqrt{\pi}} \int_0^{2\pi} \left\lparen
\left\lparen -\frac{\cos^3 \frac{\pi}{2}}{3} \right\rparen - \left\lparen -\frac{\cos^3
0}{3} \right\rparen \right\rparen \, d \phi = \frac{1}{\pi} \frac{\sqrt{3}}{2
\sqrt{\pi}} \int_0^{2\pi} \frac{1}{3} \, d \phi = \frac{1}{\pi} \frac{\sqrt{3}}{2
\sqrt{\pi}} \frac{1}{3} \int_0^{2\pi} 1 \, d \phi = \frac{1}{\pi} \frac{\sqrt{3}}{2
\sqrt{\pi}} \frac{1}{3} 2\pi = \frac{\sqrt{3}}{3 \sqrt{\pi}}
T 1 = ∫ S 2 π 1 ( cos θ ) + Υ 1 0 ( ω
) d ω
= ∫ S 2 π 1 ( cos θ ) + 2 π
3
z d ω
= π 1 2 π
3
∫ S 2 ( cos θ ) + z d ω
= π 1 2 π
3
∫ H 2 cos θ cos θ d ω
= π 1 2 π
3
∫ 0 2 π ( ∫ 0 2 π cos θ cos θ sin θ d θ ) d ϕ = π 1 2 π
3
∫ 0 2 π ( ( − 3 cos 3 2 π ) − ( − 3 cos 3 0 ) ) d ϕ = π 1 2 π
3
∫ 0 2 π 3 1 d ϕ = π 1 2 π
3
3 1 ∫ 0 2 π 1 d ϕ = π 1 2 π
3
3 1 2 π = 3 π
3
Product
By "Basic Properties" of "3. Review of Spherical Harmonics" of [Sloan 2002], due
to the orthonormality of the SH basis, we have
∫
S
2
L
(
ω
→
)
1
π
(
cos
θ
)
+
d
ω
→
=
∫
S
2
(
∑
L
l
m
Υ
l
m
(
ω
→
)
)
(
∑
T
l
m
Υ
l
m
(
ω
→
)
)
d
ω
→
=
∑
L
l
m
T
l
m
\displaystyle \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega}) \frac{1}{\pi} (\cos \theta)^+ \,
d\overrightarrow{\omega} = \int_{\mathrm{S}^2} (\sum \mathrm{L}_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})) (\sum \mathrm{T}_l^m
\operatorname{\Upsilon_l^m}(\overrightarrow{\omega})) \, d\overrightarrow{\omega} = \sum
\mathrm{L}_l^m \mathrm{T}_l^m
∫ S 2 L ( ω
) π 1 ( cos θ ) + d ω
= ∫ S 2 ( ∑ L l m Υ l m ( ω
)) ( ∑ T l m Υ l m ( ω
)) d ω
= ∑ L l m T l m
Due to circular symmetry of the light distribution and the normalized clamped cosine, only the
coefficients on the ZH(Zonal Harmonics) of the light distribution and the normalized clamped cosine are
non-zero.
For l = 0, we have
L
0
T
0
=
π
(
1
−
cos
α
)
1
2
π
=
1
2
(
1
−
cos
α
)
\displaystyle \mathrm{L}_0 \mathrm{T}_0 =
\sqrt{\pi} (1 - \cos \alpha) \frac{1}{2 \sqrt{\pi}} = \frac{1}{2} (1 - \cos \alpha)
L 0 T 0 = π
( 1 − cos α ) 2 π
1 = 2 1 ( 1 − cos α )
For l = 1, we have
L
1
T
1
=
3
π
2
sin
2
α
3
3
π
=
1
2
sin
2
α
\displaystyle \mathrm{L}_1 \mathrm{T}_1 =
\frac{\sqrt{3} \sqrt{\pi}}{2} \sin^2 \alpha \frac{\sqrt{3}}{3 \sqrt{\pi}} = \frac{1}{2}
\sin^2 \alpha
L 1 T 1 = 2 3
π
sin 2 α 3 π
3
= 2 1 sin 2 α
However, the result
L
0
T
0
=
1
2
(
1
−
cos
α
)
\displaystyle \mathrm{L}_0 \mathrm{T}_0 =
\frac{1}{2} (1 - \cos \alpha)
L 0 T 0 = 2 1 ( 1 − cos α )
L
1
T
1
=
3
4
sin
2
α
\displaystyle \mathrm{L}_1 \mathrm{T}_1 =
\frac{3}{4} \sin^2 \alpha
L 1 T 1 = 4 3 sin 2 α NOT
correct. We have the counterexample when the cone angle
α
\displaystyle \alpha
α
π
2
\displaystyle \frac{\pi}{2}
2 π
∫
S
2
L
(
ω
→
)
1
π
(
cos
θ
)
+
d
ω
→
=
∫
H
2
1
π
cos
θ
d
ω
→
=
1
π
∫
H
2
cos
θ
d
ω
→
=
1
π
∫
H
2
1
d
ω
⊥
→
=
1
π
π
=
1
\displaystyle \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega}) \frac{1}{\pi} (\cos \theta)^+ \,
d\overrightarrow{\omega} = \int_{\mathcal{H}^2} \frac{1}{\pi} \cos \theta \,
d\overrightarrow{\omega} = \frac{1}{\pi} \int_{\mathcal{H}^2} \cos \theta \,
d\overrightarrow{\omega} = \frac{1}{\pi} \int_{\mathcal{H}^2} 1 \, d
\overrightarrow{\omega^{\perp}} = \frac{1}{\pi} \pi = 1
∫ S 2 L ( ω
) π 1 ( cos θ ) + d ω
= ∫ H 2 π 1 cos θ d ω
= π 1 ∫ H 2 cos θ d ω
= π 1 ∫ H 2 1 d ω ⊥
= π 1 π = 1
∫
S
2
L
(
ω
→
)
1
π
(
cos
θ
)
+
d
ω
→
=
L
0
T
0
+
L
1
T
1
=
1
2
(
1
−
cos
α
)
+
1
2
sin
2
α
=
1
2
(
1
−
cos
π
2
)
+
1
2
sin
2
π
2
=
1
\displaystyle \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega}) \frac{1}{\pi} (\cos \theta)^+ \,
d\overrightarrow{\omega} = \mathrm{L}_0 \mathrm{T}_0 + \mathrm{L}_1 \mathrm{T}_1 =
\frac{1}{2} (1 - \cos \alpha) + \frac{1}{2} \sin^2 \alpha = \frac{1}{2} (1 - \cos
\frac{\pi}{2}) + \frac{1}{2} \sin^2 \frac{\pi}{2} = 1
∫ S 2 L ( ω
) π 1 ( cos θ ) + d ω
= L 0 T 0 + L 1 T 1 = 2 1 ( 1 − cos α ) + 2 1 sin 2 α = 2 1 ( 1 − cos 2 π ) + 2 1 sin 2 2 π = 1 . However, according to result by [Kaplanyan
2009], we have
∫
S
2
L
(
ω
→
)
1
π
(
cos
θ
)
+
d
ω
→
=
L
0
T
0
+
L
1
T
1
=
1
2
(
1
−
cos
α
)
+
3
4
sin
2
α
=
1
2
(
1
−
cos
π
2
)
+
3
4
sin
2
π
2
=
5
4
\displaystyle \int_{\mathrm{S}^2}
\operatorname{L}(\overrightarrow{\omega}) \frac{1}{\pi} (\cos \theta)^+ \,
d\overrightarrow{\omega} = \mathrm{L}_0 \mathrm{T}_0 + \mathrm{L}_1 \mathrm{T}_1 =
\frac{1}{2} (1 - \cos \alpha) + \frac{3}{4} \sin^2 \alpha = \frac{1}{2} (1 - \cos
\frac{\pi}{2}) + \frac{3}{4} \sin^2 \frac{\pi}{2} = \frac{5}{4}
∫ S 2 L ( ω
) π 1 ( cos θ ) + d ω
= L 0 T 0 + L 1 T 1 = 2 1 ( 1 − cos α ) + 4 3 sin 2 α = 2 1 ( 1 − cos 2 π ) + 4 3 sin 2 2 π = 4 5 NOT correct.
Rotation
We need to rotate the light from the Z axis to the specific direction
[
x
y
z
]
=
[
sin
θ
cos
ϕ
sin
θ
sin
ϕ
cos
θ
]
\displaystyle \begin{bmatrix} x & y &
z\end{bmatrix} = \begin{bmatrix} \sin \theta \cos \phi & \sin \theta \sin \phi &
\cos \theta \end{bmatrix}
[ x y z ] = [ sin θ cos ϕ sin θ sin ϕ cos θ ]
R
=
R
z
(
ϕ
)
R
y
(
θ
)
=
[
cos
ϕ
−
sin
ϕ
0
sin
ϕ
cos
ϕ
0
0
0
1
]
[
cos
θ
0
sin
θ
0
1
0
−
sin
θ
0
cos
θ
]
=
[
cos
θ
cos
ϕ
−
sin
ϕ
sin
θ
cos
ϕ
cos
θ
sin
ϕ
cos
ϕ
sin
θ
sin
ϕ
−
sin
θ
0
cos
θ
]
\displaystyle \mathrm{R} = \mathrm{R_z}(\phi)
\mathrm{R_y}(\theta) = \begin{bmatrix} \cos \phi & - \sin \phi & 0 \\ \sin \phi
& \cos \phi & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} \cos \theta
& 0 & \sin \theta \\ 0 & 1 & 0 \\ - \sin \theta & 0 & \cos
\theta \end{bmatrix} = \begin{bmatrix} \cos \theta \cos \phi & - \sin \phi &
\sin \theta \cos \phi \\ \cos \theta \sin \phi & \cos \phi & \sin \theta \sin
\phi \\ - \sin \theta & 0 & \cos \theta \end{bmatrix}
R = R z ( ϕ ) R y ( θ ) = ⎣
⎡ cos ϕ sin ϕ 0 − sin ϕ cos ϕ 0 0 0 1 ⎦
⎤ ⎣
⎡ cos θ 0 − sin θ 0 1 0 sin θ 0 cos θ ⎦
⎤ = ⎣
⎡ cos θ cos ϕ cos θ sin ϕ − sin θ − sin ϕ cos ϕ 0 sin θ cos ϕ sin θ sin ϕ cos θ ⎦
⎤
D
1
(
R
)
=
[
R
11
−
R
12
R
10
−
R
21
R
22
−
R
20
R
01
−
R
02
R
00
]
=
[
cos
ϕ
−
sin
θ
sin
ϕ
cos
θ
sin
ϕ
0
cos
θ
sin
θ
−
sin
ϕ
−
sin
θ
cos
ϕ
cos
θ
cos
ϕ
]
=
[
cos
ϕ
−
y
cos
θ
sin
ϕ
0
z
sin
θ
−
sin
ϕ
−
x
cos
θ
cos
ϕ
]
\displaystyle \operatorname{D_1}(\mathrm{R}) =
\begin{bmatrix} {\mathrm{R}}_{11} & -{\mathrm{R}}_{12} & {\mathrm{R}}_{10} \\
-{\mathrm{R}}_{21} & {\mathrm{R}}_{22} & -{\mathrm{R}}_{20} \\ {\mathrm{R}}_{01}
& -{\mathrm{R}}_{02} & {\mathrm{R}}_{00} \end{bmatrix} = \begin{bmatrix} \cos
\phi & - \sin \theta \sin \phi & \cos \theta \sin \phi \\ 0 & \cos \theta
& \sin \theta \\ - \sin \phi & -\sin \theta \cos \phi & \cos \theta \cos
\phi \end{bmatrix} = \begin{bmatrix} \cos \phi & - y & \cos \theta \sin \phi \\
0 & z & \sin \theta \\ - \sin \phi & -x & \cos \theta \cos \phi
\end{bmatrix}
D 1 ( R ) = ⎣
⎡ R 11 − R 21 R 01 − R 12 R 22 − R 02 R 10 − R 20 R 00 ⎦
⎤ = ⎣
⎡ cos ϕ 0 − sin ϕ − sin θ sin ϕ cos θ − sin θ cos ϕ cos θ sin ϕ sin θ cos θ cos ϕ ⎦
⎤ = ⎣
⎡ cos ϕ 0 − sin ϕ − y z − x cos θ sin ϕ sin θ cos θ cos ϕ ⎦
⎤
However, the result
D
1
(
R
)
=
[
?
y
?
?
−
z
?
?
x
?
]
\displaystyle \operatorname{D_1}(\mathrm{R}) =
\begin{bmatrix} ? & y & ? \\ ? & -z & ? \\ ? & x & ?
\end{bmatrix}
D 1 ( R ) = ⎣
⎡ ? ? ? y − z x ? ? ? ⎦
⎤ NOT correct. We have the counterexample when the "vcDir" is
[
0
0
1
]
\displaystyle \begin{bmatrix} 0 & 0 & 1
\end{bmatrix}
[ 0 0 1 ] NOT rotate the light at all. This means that the coefficients should be the same in this
case, namely, vResult.xyzw == half4(vZHCoeffs.x, 0, vZHCoeffs.y, 0). However, according to result
by [Kaplanyan 2009], we have vResult.xyzw = half4(vZHCoeffs.x, 0, -vZHCoeffs.y, 0) which is
NOT correct.
References
[Ramamoorthi 2001 A] Ravi Ramamoorthi, Pat
Hanrahan. "On the Relationship between Radiance and Irradiance: Determining the illumination from
images of a convex Lambertian object." JOSA 2001. Ravi Ramamoorthi, Pat Hanrahan.
"An Efficient Representation for Irradiance Environment Maps." SIGGRAPH 2001. Peter-Pike Sloan, Jan Kautz,
John Snyder. "Precomputed Radiance Transfer for Real-Time Rendering in Dynamic, Low-Frequency Lighting
Environments." SIGGRAPH 2002. Jan Kautz, Peter-Pike Sloan, John
Snyder. "Fast, Arbitrary BRDF Shading for Low-Frequency Lighting Using Spherical Harmonics." EGWR
2002. Peter-Pike Sloan. "Stupid
Spherical Harmonics (SH) Tricks." GDC 2008. Anton
Kaplanyan. "Light Propagation Volumes in CryEngine 3." SIGGRAPH 2009. Sebastian Lagarde, Charles
Rousiers. "Moving Frostbite to PBR." SIGGRAPH 2014. John Hable.
"Simple and Fast Spherical Harmonic Rotation." Filmic Worlds Blog 2014.